INSプラットホームについて
INS のプラットホームは常に水平で、方向は真方位(地球自転軸と一致する北)の真北を維持する必要があります。
この水平維持を制御する手段としてジャイロを利用しますが、ジャイロは地球の自転の影響を受ける為プラットホームを水平に維持出来ません。
この為プラットホームを常に水平で真北に維持する為には地球の自転に合わせてプラットホームの姿勢を修正する必要があります、この修正する為のデーターとして現在位置の緯度を必要とします、つまりプラットホームの修正量は緯度により変化する事になります、そしてこの緯度は INS アライメント(初期設定)時はパイロットにより駐機場の緯度を入力しますが、その後飛行することで位置が変わりますと、INS 自身が求めた位置の緯度を使用します。
では INS の計算誤差の為に INS が認識している緯度と実際の航空機の現在地の緯度が異なりますと、プラットホームを正しく修正する事が出来なくなり、水平が維持出来なく少しずつ傾きが出てきます、その結果、加速度センサーは地球重力の一部をセンスする事となり、そのセンスした地球重力加速度が速度計算に影響を与える為 INS の誤差は拡大する事になります。
更にプラットホームは飛行した移動距離に応じて修正しないと、やはり傾いてしまいますので INS 自身が計算して求めた移動距離と方位を基に修正をします、しかし誤差を持った INS は正しい移動距離と方位を認識していない為やはりプラットホームは傾き INS の誤差が拡大します。
この様に INS 航法は小さな誤差であっても長時間使用すると誤差が蓄積され、大きな誤差に発展します、特にアンカレッジでは 緯度が高い為にINS アライメントの精度が低下するうえにソウルまでのフライトは長時間を要する為に INS の誤差の蓄積が心配されます、しかも洋上フライトであり、地上航法無線局の援助を受けれない等々を勘案しますと、パイロットは、このフライトでの INS の精度については十分な注意を払っていたと考えられます。
プラットホームの水平を維持する為の修正量は航空機の移動に伴い刻々と変化する為シミュレーションでは1秒毎のルートの計算をし、プラットホームの傾きから生じる誤差を含めて逸脱ルートを計算しました。
大圏コースの緯度、経度の求め方とルート計算
正規ルートの距離のトラックアングル
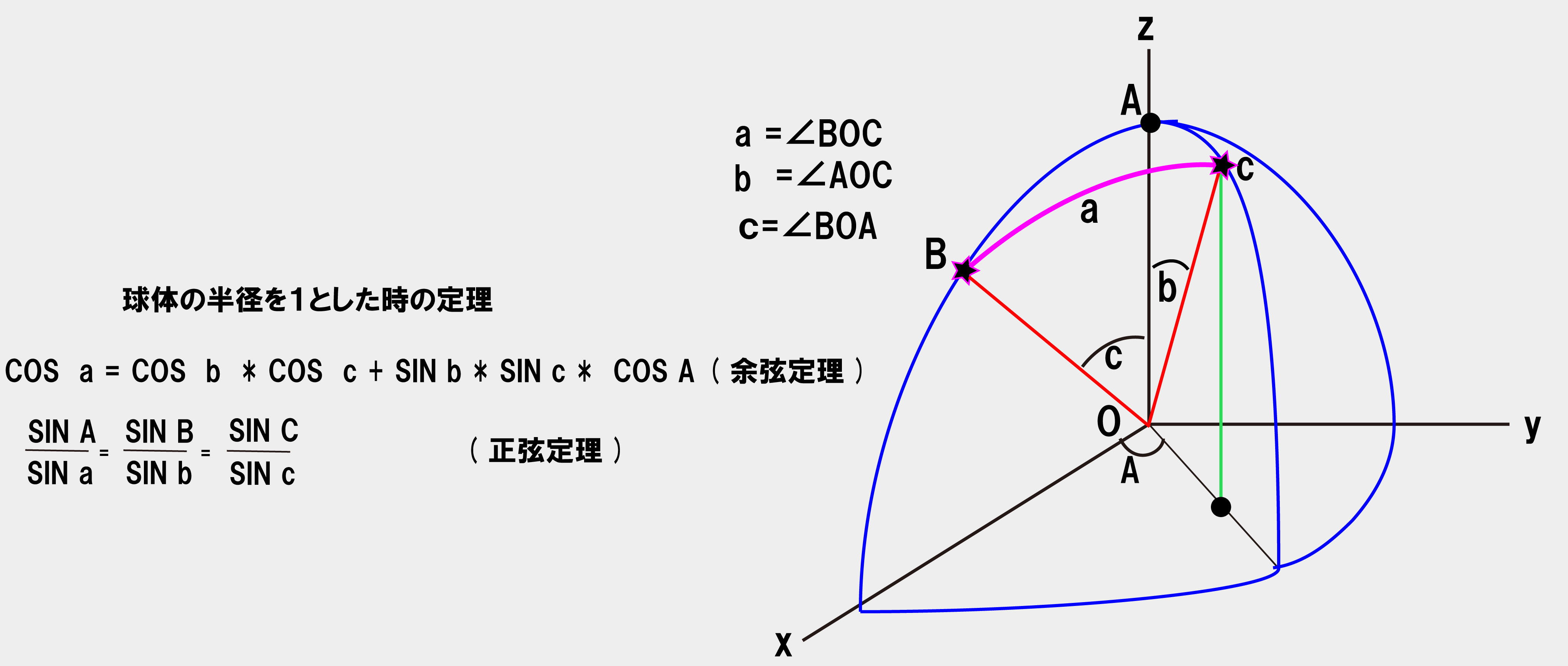
INS の設定するコースは大圏コースであり、これは地球を球面体と考えて球面三角形の余弦定理及び正弦定理の式より求めました。
この式を使用しますと2地点間の緯度、経度が与えられると、その地点間の距離とトラックアングルが求められる又1地点の緯度、経度と次の地点までの距離及びトラックアングルが与えられると、次の地点の緯度と経度を求めることが出来ます。
実際の INS がどの様な計算式を使用しているかは不明ですが、この式の計算結果を実際に使用しているフライトプランのリストと照合したところ、両データーは一致し一連のシミュレーションの使用に問題ないことを確認しました。
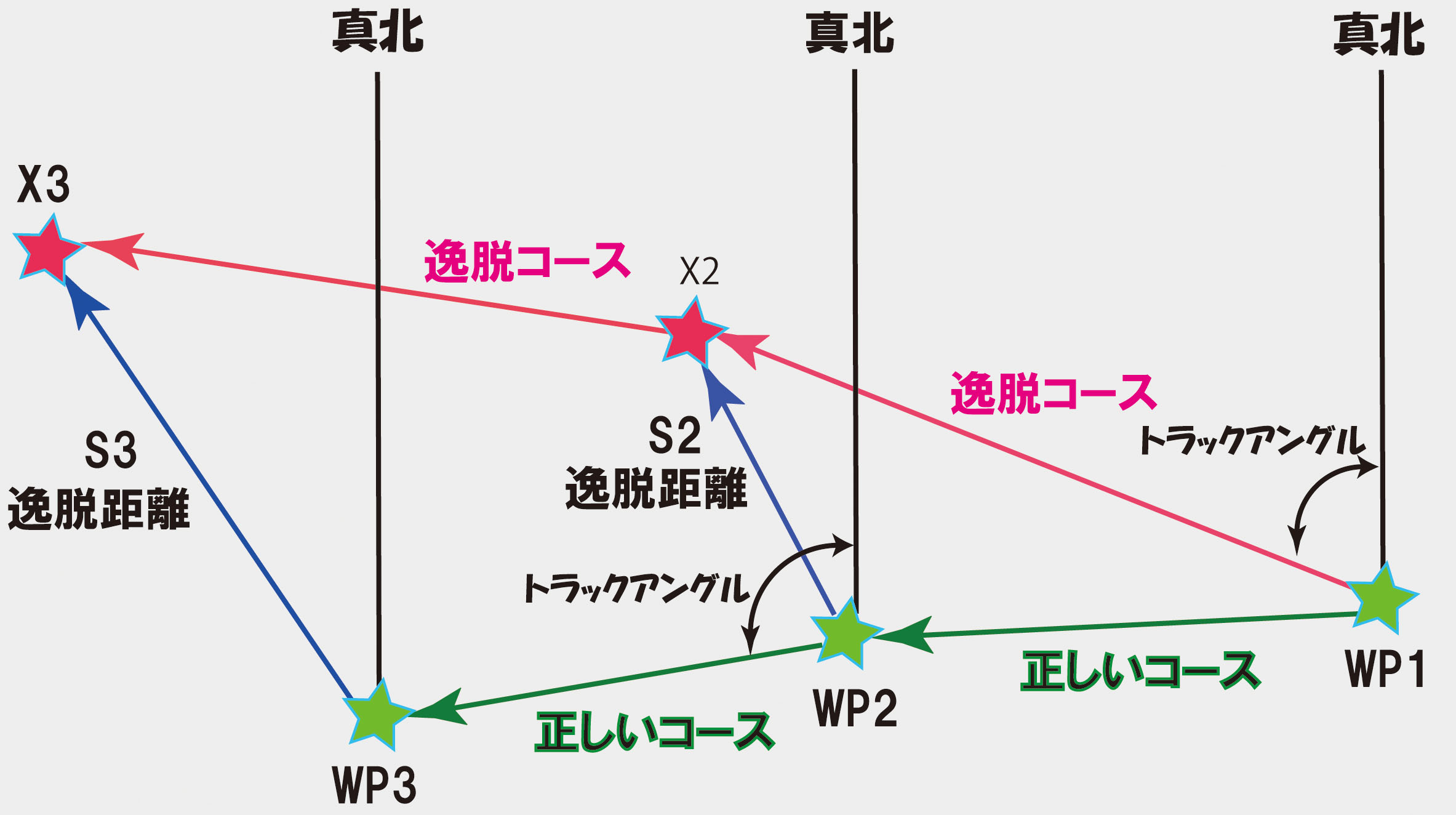
ルート計算
- INS に入力した各ウェーポイント( WP-1,WP-2,WP-3 )の緯度と経度にて正しいルートの距離とトラックアングルを求める。
- 各ウェーポイントの通過時刻は KE007 の位置通報により判明していますので各ウェーポイントでの誤差距離はその時刻より求める事が出来ますが、更に前述したプラットホームの傾き及び真方位のずれによる誤差合成した最終誤差距離(コース逸脱距離)を求める。
- 1 及び 2 のデーターを基にして逸脱したコースのウェーポイント( WP-X2,WP-X3)の緯度、経度を求め、更に対地速度(経由地点間の平均速度)トラックアングル、飛行距離、到達時間差、風のデーターがあるポイントでは、実際の風に方向と強さを算出しました。
以上が INS のプラットホーム上の加速度センサーに誤ったセンサー補正値がセットされたものと仮定した場合 INS がどの様な航法計算を行うかを考察しました、この考察結果をもとにプログラムを作成しパソコンにて計算することで逸脱ルートを求めました。
シミュレーションはプログラムを起動し、センサー補正値の方位と加速度値を入力する事で一連の計算をさせ、逸脱ルートを求めます。