シミュレーションを行う為の設定項目の概要
1. シミュレーイションを行うにあたっての条件として以下の項目を設定した。
- KE007 のコース逸脱の要因をアンカレッジ出発時に INS ナビゲーション・モード・スイッチをプッシュバック (出発の為駐機場より航空機をトラクターにて押し出す事)の移動中に伴い生じる加速度を INS の加速度検出器が検出し、その結果 INS のプラットホーム上の加速度検出器に対し誤差を補正する為の補整値がセットされた状態にてINS は航法計算を始めたと仮定した。
- 従ってアンカレッジにおける出発準備段階に於いて 現在位置の値は正確に INS へインプットされたものと仮定した。
- INS での飛行ルートであるアンカレッジからソウルまでの各ウェイポイントも正確に INS へインプットされたものと仮定した。
- INS の計算機能と自動操縦装置とのインターフェイスは正常と仮定した。
- INS 以外の航法システム、計器システムは全て正常と仮定した。
- サハリン東方海上より始まったソ連戦闘機の通信内容について、パイロットは故意に偽りの報告はしていないものと仮定した。
- KE007 パイロットの各ウェイーポイントに於ける航空機管制所への位置通報の内容は偽りのないものと仮定した。
2.検証について
上記の仮定項目をベースとし KE007 が撃墜されたサハリン西岸上空に到達するのに必要な誤差加速度を求 め、 INS にその誤差加速度を加えた状態にて飛行コースを計算し、その飛行コース上に、既に判明しているアンカレッジとベセル間のレーダーによる航跡が符合するかどうか又サハリン上空での自衛隊レーダーの航跡に符合するかどうか更にサハリン東方より追尾したソ連戦闘機の報告内容と符合するかどうかを検 証のポイントとしました。
3. INS 加速度誤差発生の考え方
INS ナビゲーションユニット内のメカニズム、計算手法の概略は次の様に考えます。
INS のプラットホームは航空機の変動による影響を除去し安定させる為にジャイロを使用し更に角度センサー やトルカーを組み合わせたサーボループにより制御していますが、INS アライメントの時には加速度センサーの出力をこのサーボループ系に入力することにより加速度センサーが地球の重力を検出しなくなるように(プラットホームを水平にする)制御します,しかしジャイロは一定の方向を維持する特性により地球の自転の影響を受ける結果水平面を設定することが出来ません、この為現在位置の緯度を元に地球の自転に伴い水平面がずれる割合を計算から求め、その補正値をサーボループヘ入力することでプラットホームの水平面と真方位(地球の自転軸)を設定します、従って INS アライメントは正しい現在位置の緯度をインプットし又航空機を動かさないのが絶対条件となります。
一方 INS のプラットホームは機械的機構ですので発生する誤差を考慮する必要があります、プラットホームのアライメントが完了し水平面が設定されても、この誤差により加速度センサーの出力は完全にはゼロになるとは限りませんので INS 自身この誤差を検出して補正することで精度を上げています、この補正値がある値以上になりますと警告ランプを点灯させ INS が異状であることを示します。
アライメントが完了しますとレディ・ナビゲーション・ライトが点灯するのでパイロットは INS モード・スイッチをナビゲーション・モードに切り換えます。
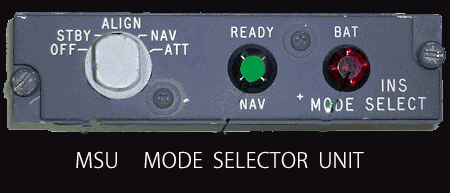
ナビゲーション・モードに切り換えると加速度センサーはプラットホーム・スタビライズ・サーボループ系より切り離されて、速度計算の為のセンサーとして機能しますので、この時点での加速度センサーの出力は完全にゼロにする必要があります、もしもゼロでない場合はゼロにするための補正値が INS にセットされると考えます。
一般的に計測機器は使用前にゼロ点調整を行いますが、INS についても加速度センサーはナビゲーション・モードになった時点でゼロ点調整が行われると考えます。
4. 以上の考え方に基づいて KE007 の場合をみますと
アンカレッジでの INS に入力する現在位置の緯度、経度は正確にインプットされ INS のアライメントは正常に行われたにもかかわらず INS モードスイッチをプッシュバック中の航空機移動中にナビゲーション位置とした為に、その時の移動に伴い発生した加速度が加速度検出器のゼロ点調整の為の補正値として INS にセットされた,つまりゼロ点調整を誤ってセットしたと同じ状況が発生し, INS はこの誤った補正値を含めた加速度検出器の出力を基に航法計算をした結果 INS は北方にずれるコースへと航空機を誘導したものと考えました。