加速度センサー補正に誤差がある場合のルート設定について
例えば 航空機がA点からB点までの区間を飛行時間T秒間で飛行したケースで考察します。
加速度センサーの補正に誤差値を内包した状態にて航法計算を行うと以下の様な結果を招くと考えます。
セットされた誤差補正値を基に INS は飛行時間T秒後の航空機の移動距離と位置を計算します、そのINS の誤った移動距離は
S=BC=1/2×誤差補正加速度値×時間秒^2 となります、従って INS が計算して求めた位置はこの移動距離 S を航空機の実際に飛行した移動距離 A-B と合成した位置であるC点の緯度、経度を表示するとものと考えました、つまりA点からB点まで飛行した際、INSはA点からC点まで飛行したと認識し、C点の緯度、経度を表示します。
実は正常な INS においても誤差を完全にゼロにする事は出来ない為この様な移動距離誤差は生じますが、その許容誤差距離は 3×3×時間 を目安としています、つまり1 時間後の許容誤差は最高で6ノーチカルマイルとなりますが、正常な INS の精度は高く、6ノーチカルマイルも誤差を生じる事は通常ありません。
KE007のケースでは約飛行1時間後のベセルでの逸脱距離がレーダー航跡にて12ノーチカルマイルと判明していますので、異常に大きな誤差が INS に有ったと考えられます。
では、INS が計算した誤った位置を飛行中のパイロットが確認出来る可能性について考察します。
航空機が実際に到達したB点の位置を地上航法無線標識で確認出来れば可能となります、INS の機能の一つとして INS が計算したコース上より航空機の現在位置が 異なりますと、INS コースより外れた距離を表示します、今パイロットは地上航法無線標識にて確実に航空機の位置をB点と確認しているわけですから、INS の計 算したコースから外れた距離と、C点の位置を示す緯度、経度を確認することでINS の精度が正しくないと確認する事が可能となります。
しかし、B点に地上航法無線標識が無いケースですと正しい位置確認は出来ませんので、INSの精度を確認することは不可能です。
自動操縦装置をこの誤差のある INS にて誘導する INS モードで飛行するケースを考察します。
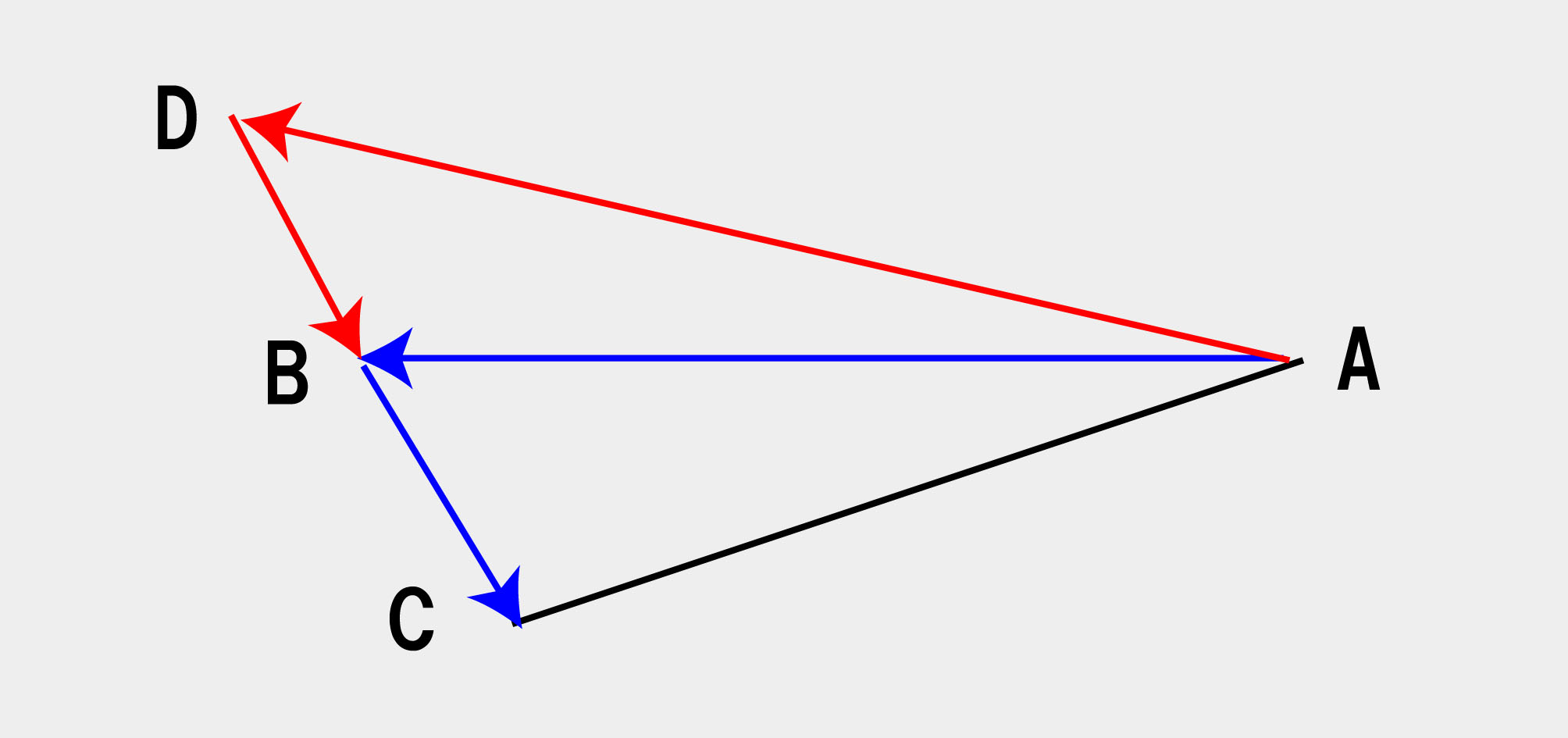
本来の目標地点がB点の時 INS は誤差補正加速度値を内包したデーターにより計算しますのでINSはA-C上を飛行してC点に向かっていると認識します、よっ て目標地点のB点に到達すべく誘導を行う必要があります、もともとこの誤った誘導は誤差補正加速度ベクトルが原因ですので、正しい誘導を行うには誤差補正加 速度ベクトルと逆方向のベクトルにて誘導することで解決します、その結果航空機はD点に向かって誘導されD点に到達しますが INS の計算は誤差の補正加速度ベ クトルを加えていますので実際にはD点に到達してもINSはB点へ正しく誘導したと認識します。
ではパイロットはこの INS の誤った誘導に気が付くでしょうか、もしも本来の目標地点であるB点に無線標識がありますと、D点は無線標識より離れている為 INS の誤った誘導に気が付くはずです、しかし無線標識が無いとなれば確認の方法はありません、勿論この時の INS の表示するデーターはオン・コースを表示していますので、正規の飛行ルートから逸脱しているとは、全く知る由もありません。
INS に誘導されたコース A-D と正規のコース A-B とでは飛行距離が異なりますが、この現象を INS はどの様に表示するかについて考察します。
飛行中の航空機は風の影響を完璧に受けます、例えば 300 ノットで飛行している場合、無風状態ですと対地速度も 300 ノットですが 50 ノットの追い風が有りま すと対地速度は 350 ノットになります、横風ですと風下にコースが外れますのでコースを外さない様に
機種を風上の方向に修正する必要があります、この様に風が有りますと真大気速度と対地速度に差が生じます、また風上に機種を修正する偏流角が生じます、航空 機は風のデーターを直接知ることは出来ませんが、これらのデーターを基に計算して間接的に風を検出する方法とっており、これらの計算は INS が行っています,
さて、この INS の機能をふまえて考察します。
加速度センサー補正誤差により誘導され生じた距離 D-B の誤差距離の影響によりD点に到達しますが、INS 自身は A-B を飛行したと認識します、しかし実際には A-D を飛行したわけで、この両者のコース距離に差が生じます,そしてこのコース距離の差は風により生じたものとして INS は計算すると考えました。
誤差により生じた風は、実在の風では無い為偏流角は検出しませんので、風の方向は、機首方向となり、追い風又は向かえ風となります、この架空の風は両者のコ ース距離に差がある時に発生し、差が無いときには発生しません、両者のコース距離に差が出る割合は加速度センサー補正誤差の方向と正規の INS コースの方向の 相対角度で変化します、相対角度がゼロの時、つまり加速度センサー補正誤差の方向と INS 正規のコースの方向が一致している場合は INS は正規のコース上を誘 導します、しかしセンサー補正誤差のベクトルが全て架空の風として計算される事になります。
一方 INS の加速度センサーは補正誤差を含んではいるもののセンサー自体の機能は正常の為実在する風の検出機能は正常ですのでINS は実在する風のベクトルと誤 差により生じた風のベクトルを合成し風のデーターとして表示します,
また INS 表示の対地速度は A-D を飛行する速度が実際の速度であるにもかかわらず、A-B を飛行する速度を表示します。
このベクトル図の例では両者コースの距離の差は向かい風として処理します、しかしこの風は実在しませんので、飛行距離は、誤った風のベクトル分伸びてしまう 事となりD点に到達します。
実際の風は、INS の風のデーターを INS の認識しているコースの方位と、実際の対地速度と INS の示す対地速度の差より求められるベクトルを分解する事で得ら れるとしました。
この様な INS データーをパイロットはどの様に判断するのでしょうか、パイロットは飛行前に気象情報を確認していますので、予報された風と INS の風のデータ ーに差が有ることを察知すると思います、しかし予報データーとの違いは当然あり得る事ですので、極端に大きな差がなければ、納得する可能性は高いと思いま す、一旦風のデーターに納得してしまいますと、INS は風のデーターも含めて航法計算しますので、INS が表示する諸々のデーター間の整合性は計られますの で、パイロットは INS データーの異常を察知することは難しいと考えます。
過去に、アンカレッジ空港を離陸後、風のデーターが異常であることを察知し、引き返した事例があります、原因はINSのトラブルであった事が報告されていま す,これらの考察に基づくと KE007 の INS が表示した風のデーターは正しくない事になります、KE007 は位置通報の中で風のデーターを報告しています、一連のシ ミュレーションではINSの風に対する考察を基にしてKE007 の誤りの風のデーターから本当の風のデーターを割り出しました。
KE007 はベセルでの風を 295 度より 25 ノットと報告しています、このデーターから実際の風を求めた結果は 309 度から> 18.6 ノットとなりました,
ベセルでの風の位置報告は、同じ大韓航空の KE015 便が約15分後に 310 度から 20 ノットと報告していますので ( KE015 便もアンカレッジからソウル行きの 便であり予定通りソウルに到着している)シミュレーションの計算結果は KE015 便の風のデーターに近く、上記考察は正しいのではないかと考えます。
以上がINS 加速度センサーに補正誤差がある状態にて派生する諸現象について考察しました。